Arduino-AD9850-DDS
(siehe auch https://wiki.funkfreun.de/projekte/arduino-ad9850-dds )
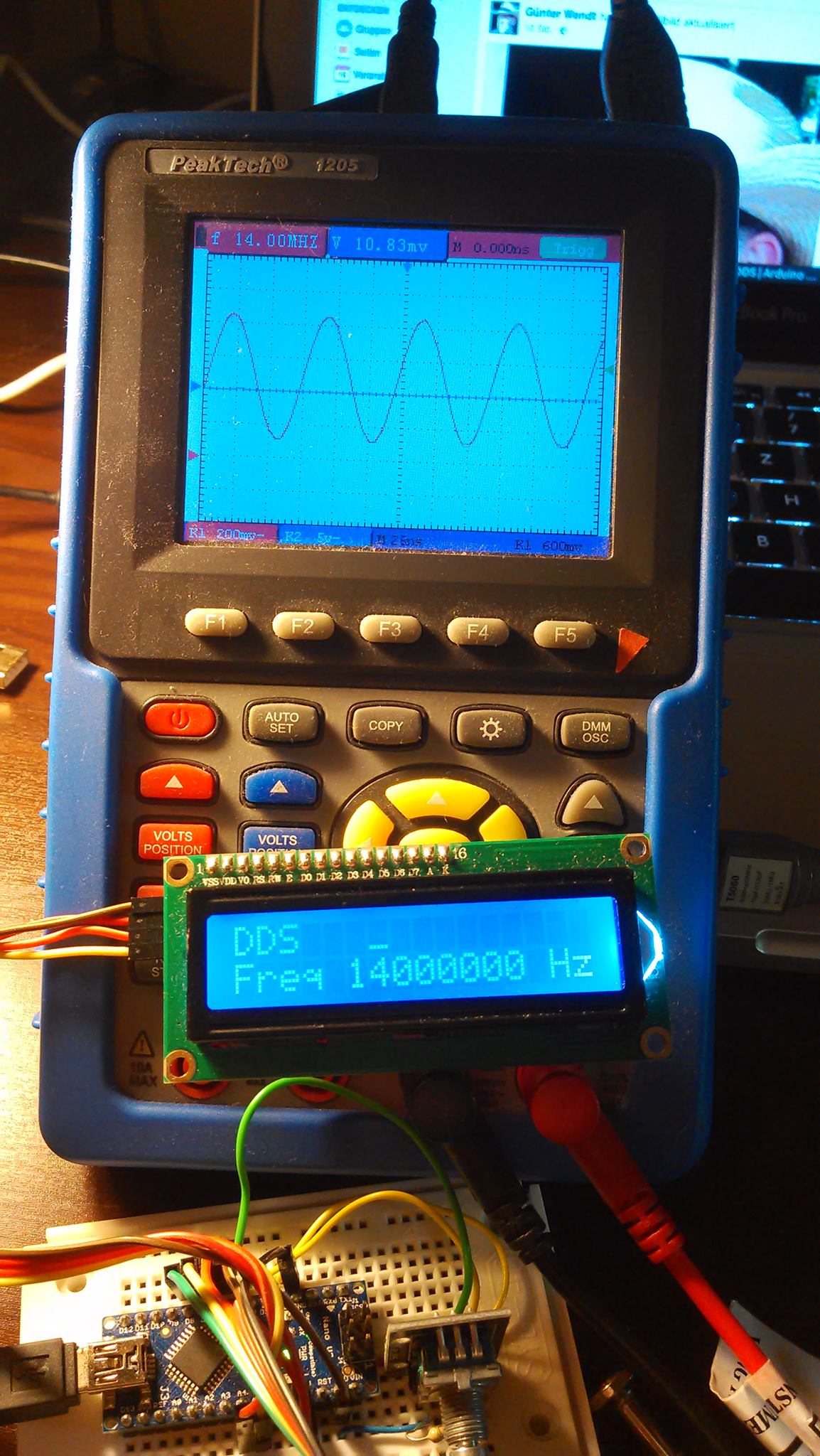
Der AD9850 (Datenblatt) ist ein DDS, der ein Sinussignal von 0-40MHz erzeugen kann.
In diesem Projekt wird er von einem Arduino Nano angesteuert.
Die Frequenzeinstellung sowie die Quartz-Kalibration erfolgt mit einem Drehencoder und einem I2C-Textdisplay (16×2). Die eingestellten Werte können im Arduino-EEPROM gespeichert werden.
| Verdrahtung am Arduino | ||
|---|---|---|
| Modul | Pin Name | Arduino Pin |
| I2C-Textdisplay | SDA | A4 |
| SCL | A5 | |
| DrehEncoder | CLK | D2 |
| DT | D3 | |
| (Button) | SW | D4 (mit 10kOhm zu VCC) |
| AD9850 | W_CLK | D5 |
| FU_UD/FQ_UD | D6 | |
| Data | D7 | |
| Reset | D8 | |
Benutzte Bibliotheken:
- Drehencoder: Encoder http://www.pjrc.com/teensy/td_libs_Encoder.html LLC - Paul Stoffregen paul@pjrc.com
- EEPROMex http://thijs.elenbaas.net/2012/07/extended-eeprom-library-for-arduino/ Thijs Elenbaas, GNU LGPL
- NewLiquidCrystal https://bitbucket.org/fmalpartida/new-liquidcrystal/wiki/Home by F. Malpartida, CC-BY-SA 3.0
- zum Teil integriert (muss nicht installiert werden, hier nur als Referenz) AD9850 https://github.com/F4GOJ/AD9850 Created 23/08/2014, Christophe Caiveau f4goj@free.fr, Public Domain
 Kurze Warnung vorab: ich bin kein Programmierer und es gibt die ein oder andere Stelle, die man noch verbessern könnte*. Auch wenn der Code gut funktioniert, bin ich für jeden Tip per Mail an danielwf@hackerspace-bremen.de dankbar - man lernt ja schließlich nie aus ;)
Kurze Warnung vorab: ich bin kein Programmierer und es gibt die ein oder andere Stelle, die man noch verbessern könnte*. Auch wenn der Code gut funktioniert, bin ich für jeden Tip per Mail an danielwf@hackerspace-bremen.de dankbar - man lernt ja schließlich nie aus ;)
*Todo: Serielle Frequenzeingabe; DrehEncoder-Eingabe tlw. ungenau; EEPROM-Update wird immer geschrieben, wenn der Mode geändert wird → Nur schreiben, wenn sich der Wert im EEPROM auch wirklich geändert hat.
Das gesamte Projekt inkl. Libraries kann hier als zip-Archiv herunterladen werden.
Arduino-Sketch Arduino-AD9850-DDS.ino (Arduino 1.6.9, Stand 17.11.2016)
// // .----------------------------------------------------------------------------------------------------------------------------------------------------------------. // | Arduino-AD9850-DDS | // '----------------------------------------------------------------------------------------------------------------------------------------------------------------' // by Daniel Wendt-Fröhlich, DL2AB (danielwf@hackerspace-bremen.de, dl2ab@darc.de) for // "Hackerspace Bremen e.V." https://hackerspace-bremen.de / HSHB Amateur Radio Group http://hshb.de/afu // License CC-by-SA 3.0 - Nov 2016 - Bremen(GER) -- http://creativecommons.org/licenses/by-sa/3.0/de/ // // Frequency selectable with push button rotary encoder // incl. XTAL-calibration and saving values to EEPROM // Used Libraries: // Encoder http://www.pjrc.com/teensy/td_libs_Encoder.html PJRC.COM, LLC - Paul Stoffregen <paul@pjrc.com> // EEPROMex http://thijs.elenbaas.net/2012/07/extended-eeprom-library-for-arduino/ Thijs Elenbaas, GNU LGPL // in parts AD9850 https://github.com/F4GOJ/AD9850 Created 23/08/2014, Christophe Caiveau f4goj@free.fr, Public Domain // NewLiquidCrystal https://bitbucket.org/fmalpartida/new-liquidcrystal/wiki/Home see website for authors and license // // // todo: set frequency via serial interface, better rotary encoder detection, EEPROM-Update only if values have really changed. // // ------------------------------------------------Connections---------------------------------------------------------- // Display SDA: A4 (check/modify 'LiquidCrystal_I2C lcd' for your used I2C-LCD-Adapter, I2C-Adress, PinOut) // Display SCL: A5 // // Rotary CLK: D2 (check/modify encResolution for your rotary encoder) // Rotary DT: D3 // Button/Rotary SW: D4 (with 10k-PullUp to VCC) // // AD9850 W_CLK: D5 // AD9850 FU_UD: D6 // AD9850 Data: D7 // AD9850 Reset: D8 // // .----------------------------------------------------------------------------------------------------------------------------------------------------------------. // | Libraries and Settings | // '----------------------------------------------------------------------------------------------------------------------------------------------------------------' // Frequencies used when no stored values are found (or are 0) double ddsFreq = 14070000; // DDS Standard frequency double calibFreq = 125000000; // XTAL Standard frequency int ddsPhase = 0; // Phase for DDS (not further used in this project, but need for DDS) double frequency; // working values for LCD and modification... double newfrequency; // ...will be set in setup byte freqCursor = 0; byte Mode = 0; // Mode 0=DDS 1=Calibrate // ------------------------------------------------EEPROM for Double-Values----------------------------------------- #include <EEPROMex.h> // EEPROM-Libs for more simple Double-Handling, http://thijs.elenbaas.net/2012/07/extended-eeprom-library-for-arduino/ #include <EEPROMVar.h> const int eepadrDDS = 10; // Adresses in EEPROM const int eepadrCAL = 20; double eepRead = 0; // read value from EEPROM // ------------------------------------------------Display---------------------------------------------------------- #include <Wire.h> #include <LiquidCrystal_I2C.h> // I2C-LCD-Library, included in Arduino-IDE LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address, SainSmartLCD2004 0x3F, maybe try 0x38 or 0x20 or 0x27 bool DisplayRefresh = 1; // ------------------------------------------------Encoder---------------------------------------------------------- #include <Encoder.h> // Encoder Library using interupts, http://www.pjrc.com/teensy/td_libs_Encoder.html Encoder myEnc(2, 3); // Pins 2+3 are usable for Interupts on the Arduino Nano byte oldPosition = 0; // beginning position of rotary counter, must be 0 byte encResolution = 4; // counted steps per rotary-step int pushButton = 4; // Button is connected to Pin 4 unsigned long rotaryDebounce = millis() + 100; // removes wrong detected/counted movements unsigned long buttonDebounce = millis() + 300; // same for button (slows down ;) byte buttonHold = 0; int8_t rotaryDirection(){ // returns Direction of rotary encoder with -1, 0 oder 1 byte i = 0; // default = no rotation byte newPosition = myEnc.read(); // reads position of encoder-lib if ( newPosition != oldPosition) { // if position has changed if ( (newPosition % encResolution == 0) && (millis() >= rotaryDebounce) ) { // calculate real steps according to rotary-resolution and debouncing if (oldPosition > newPosition) i = -1; // return value if (oldPosition < newPosition) i = 1; rotaryDebounce = millis() + 100; // timer for debouncing } oldPosition = newPosition; // working value for calculating further rotations } return i; } // ------------------------------------------------AD9850---------------------------------------------------------- // values and function from https://github.com/F4GOJ/AD9850 -- lib cannot be used, "DATA" is also in I2C-LCD-Lib const int adPinWCLK = 5; const int adPinFQUD = 6; const int adPinDATA = 7; const int adPinRESET = 8; uint32_t adDeltaphase; // calculated value send to AD9850 uint8_t adPhase; void adSetfreq(double f, uint8_t p) { // function gets frequency and phase adDeltaphase = f * 4294967296.0 / calibFreq; // calculation for value to send adPhase = p << 3; // bitshift for phase for (int i=0; i<4; i++, adDeltaphase>>=8) { // shift out the double (=4bytes) via DDS-pins shiftOut(adPinDATA, adPinWCLK, LSBFIRST, adDeltaphase & 0xFF); } shiftOut(adPinDATA, adPinWCLK, LSBFIRST, adPhase & 0xFF); // shift out phase-value digitalWrite(adPinFQUD, HIGH); digitalWrite(adPinFQUD, LOW); // DDS sets to sent value after FQUD is up } // .----------------------------------------------------------------------------------------------------------------------------------------------------------------. // | SETUP | // '----------------------------------------------------------------------------------------------------------------------------------------------------------------' void setup() { pinMode(pushButton, INPUT); // set pushButton as input Serial.begin(9600); // setup serial connection lcd.begin(16,2); // initialize the 16x2-lcd, backlight is lit lcd.backlight(); // switch backlight on lcd.setCursor(3,0); lcd.print("Arduino-"); // set display-cursor x,y and print text lcd.setCursor(2,1); lcd.print("AD9850-DDS"); delay(2000); lcd.noBacklight(); // switch backlight off, no visible screen transistion, better short-term readablity lcd.clear(); // clear content on display lcd.setCursor(0,0); lcd.print("short: sel.Pos."); // Help-Message lcd.setCursor(0,1); lcd.print("hold:save f/cal"); delay(300); lcd.backlight(); delay(2000); // ------------------EEPROM Reading while Help-Message is still on the display------------------------------- eepRead = EEPROM.readDouble(eepadrDDS); // read double from eeprom for DDS-frequency if (eepRead > 0) ddsFreq = eepRead; // check if empty (important for new installations) if not, overwrite with stored value eepRead = EEPROM.readDouble(eepadrCAL); // same for Xtal... if (eepRead > 0) calibFreq = eepRead; frequency = ddsFreq; // set working values for LCD and modification newfrequency = frequency; lcd.noBacklight(); lcd.clear(); lcd.setCursor(0,0); lcd.print("DDS _"); lcd.setCursor(0,1); lcd.print("Freq 00000000 Hz"); delay(300); lcd.backlight(); // ------------------Initialize the AD9850-DDS ------------------------------- pinMode(adPinWCLK, OUTPUT); // set output-pins pinMode(adPinFQUD, OUTPUT); pinMode(adPinDATA, OUTPUT); pinMode(adPinRESET, OUTPUT); digitalWrite(adPinRESET, HIGH); digitalWrite(adPinRESET, LOW); // init the DDS digitalWrite(adPinWCLK, HIGH); digitalWrite(adPinWCLK, LOW); digitalWrite(adPinFQUD, HIGH); digitalWrite(adPinFQUD, LOW); adSetfreq(ddsFreq, ddsPhase); // send values to AD9850 } // .----------------------------------------------------------------------------------------------------------------------------------------------------------------. // | LOOP | // '----------------------------------------------------------------------------------------------------------------------------------------------------------------' void loop() { int8_t rotaryValue = rotaryDirection(); // value for last encoder rotation (-1,0,+1) // ------------------Button------------------------------------------------- if (digitalRead(pushButton)) buttonHold = 0; // set Button-Hold-Counter to 0, if button is released if (buttonHold >= 10) { // if Button-Hold-Counter is 6, set Mode to 1 (Calibration) EEPROM.writeDouble(eepadrDDS, ddsFreq); // Writes values to EEPROM EEPROM.writeDouble(eepadrCAL, calibFreq); Mode++; // set next Mode if (Mode == 2) Mode = 0; // There are only modes 0 + 1 buttonHold = 0; // reset counter for button hold lcd.clear(); DisplayRefresh = 1; // force rewriting of lcd after mode changed if (Mode == 0) frequency = ddsFreq; // set the working frequency related to the mode if (Mode == 1) frequency = calibFreq; } if ( (!digitalRead(pushButton)) && (millis() >= buttonDebounce) ) { // if button is pressed, debounce-timer (and timer für ButtonHold-Counter) freqCursor++; // set the cursor to next position if (freqCursor == 8) freqCursor = 0; // reset cursor if it is bigger than 8 DisplayRefresh = 1; // force rewriting of lcd after something changed // lcd.setCursor((12-freqCursor),0); lcd.print("_"); // Cursor-Position on Display buttonDebounce = millis() + 300; // Debounce-Timer buttonHold++; // Button-Hold-cunter } // ------------------rotary encoder---------------------------------------------- if (freqCursor == 0) newfrequency = frequency + (rotaryValue); // calculates the frequency using Cursor-Position and rotary-encoder if (freqCursor == 1) newfrequency = frequency + (rotaryValue * 10); // the simple way works... if (freqCursor == 2) newfrequency = frequency + (rotaryValue * 100); if (freqCursor == 3) newfrequency = frequency + (rotaryValue * 1000); if (freqCursor == 4) newfrequency = frequency + (rotaryValue * 10000); if (freqCursor == 5) newfrequency = frequency + (rotaryValue * 100000); if (freqCursor == 6) newfrequency = frequency + (rotaryValue * 1000000); if (freqCursor == 7) newfrequency = frequency + (rotaryValue * 10000000); if (newfrequency <= 0) newfrequency = 0; if (Mode == 0) { if (newfrequency <= 0) newfrequency = 0; // frequency 0-40M with Mode 0 if (newfrequency >= 40000000) newfrequency = 40000000; } // Print frequency // ------------------Display Frequency------------------------------------------------- if ( (newfrequency != frequency) || DisplayRefresh ) { // Only changes the display after frequency-adjustment or DisplayRefresh-Bit DisplayRefresh = 0; frequency = newfrequency; // changes the real frequency byte freqSize = 0; // calculates the display size of the frequency double freqDec = 10; while (freqDec <= frequency) { freqSize++; freqDec = freqDec * 10; } if (Mode == 0) { lcd.setCursor(0,0); lcd.print("DDS "); } // 1st line on lcd... if (Mode == 1) { lcd.setCursor(0,0); lcd.print("Cal "); } // ...related to mode lcd.setCursor((12-freqCursor),0); lcd.print("_"); // Cursor-Position on Display if (Mode == 0) { lcd.setCursor(0,1); lcd.print("Freq 00000000 Hz"); } // 2nd line on lcd... if (Mode == 1) { lcd.setCursor(0,1); lcd.print("Xtl 000000000 Hz"); } // ...related to mode lcd.setCursor( (12-freqSize) ,1); // set cursor with calculated display size of frequency lcd.print(frequency,0); // print the frequency Serial.println(frequency,0); // serial output of the frequency if (Mode == 0) ddsFreq = frequency; if (Mode == 1) calibFreq = frequency; adSetfreq(ddsFreq, ddsPhase); // send values to AD9850 } }